
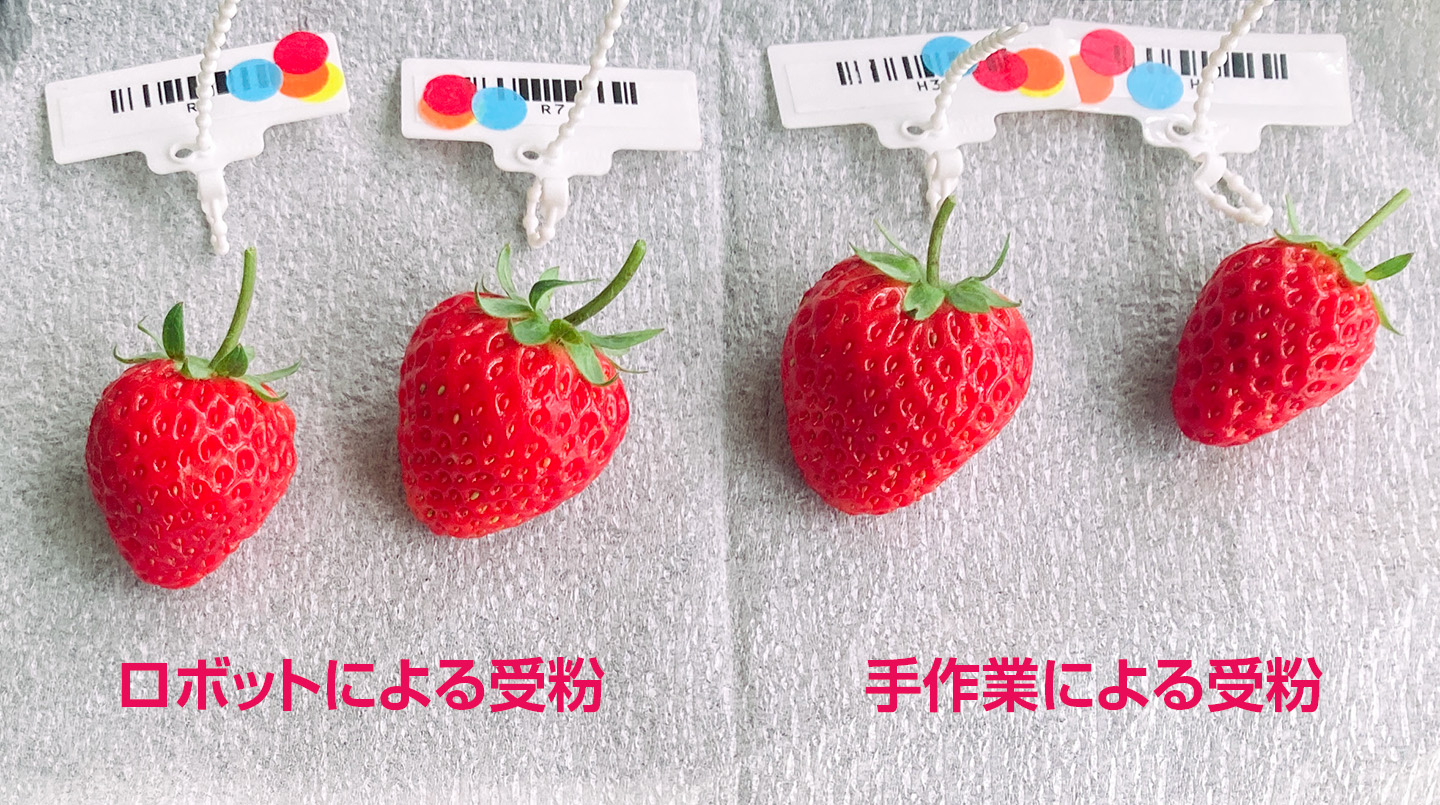
世界で初めてロボットによるイチゴの自動授粉に成功。
農業市場において存在するあらゆる課題の解決に向け、ロボット技術やAIの技術開発を進めています。
HarvestXはハチの代わりに授粉を行うにあたり、太古の昔から植物と共生してきたハチの生態に倣って授粉を行う技術を開発しています。
花の上でハチが蜜や花粉を採取する際の様子を撮影した動画から、ニューラルネットワークによりハチの骨格を推定することで、間接的にハチが行なっている授粉動作の特徴を抽出します。抽出した特徴量を授粉アルゴリズムに応用することでよりきれいな形のイチゴを形成する実験的な取り組みを行っています。 これらのロボットとアルゴリズムによる授粉と管理によって、効率性や品質の向上が達成できます。

現在我々が目にするほとんどの果実は、受粉というプロセスなしには果実を実らせることができません。受粉とは、おしべから放出される花粉がめしべに付着することを指し、赤々とした立派なイチゴが実るのも、この受粉という植物の生殖活動があってのものです。
いちごの場合は同じ一つの花の中におしべとめしべが存在し、おしべの花粉がめしべに到達するか否かで果実が実るかが決まります。自然界や農園では蜜を集めにきたハチなどの昆虫が花の上を動き回ることで体に花粉が付着し受粉が行われています。
この時、めしべに対してまんべんなく花粉が付着するように均等に受粉してやらないと、めしべのうち一部のみ受粉され、果実の形がいびつなものになってしまいます。
植物工場は受粉を担う昆虫たちが自生するには非常に過酷な環境です。イチゴの花はあまり栄養豊富な蜜を出す植物ではなく、工場内には他の植物も生えていないので、このような環境でハチは持続的に生きていくことができません。そのため一般的に植物工場ではハチを数週間から数か月に一度駆除し、また新しい巣箱を導入しています。しかし、ミツバチの個体数は世界的に減少してているうえ、生き物を使い捨てにすることは持続可能性や倫理的な問題があります。
ハチの導入自体も植物工場にとって病害の発生リスクの1つとなります。死んでしまったハチがカビの発生源となるほか、新しい巣箱から病害が持ち込まれるリスクも存在します。 また、ハチを用いた場合1つの株にいくつ授粉を行うか、めしべにまんべんなく花粉を付着させるか等をコントロールすることができません。そのため、現在の農業ではどうしても果実の見た目や味、収量にばらつきが出てしまいます。

HarvestXは、花と果実の成熟度情報を用いた高精度な収量予測システムの開発に取り組んでいます。どの苗からどれくらい花が咲いているのか、果実の成長レベルはどの程度なのか、自動授粉・収穫に併せてこれらの情報を統計的に処理することで、より生産性の高い育苗環境を確立できます。
収量予測システムに先駆けて、HarvestXでは果実の成熟度分類アルゴリズムを開発しました。このアルゴリズムは、イチゴを結実の初期状態から収穫可能時期まで細かく4段階に分類します。果実の成熟度をアルゴリズムを用いて判定することで、人間の判断によるばらつきを防いで適切に収穫時期を見積ることができます。
ROS/ROS2は、近年ダウンロード数を急速に伸ばしているロボットアプリケーションの構築を支援するソフトウェアライブラリおよびツールのセットです。ソフトウェア間の通信インターフェスに統一的なルールを導入することで、ロボット開発の効率を大幅に高めることができます。
HarvestXでは現在約100個のROS2 Packageを作成して開発を進めています。 ROS2インターフェースの力を借りて、多種多様な植物工場での課題に柔軟に対応できるロボットを作成しています。
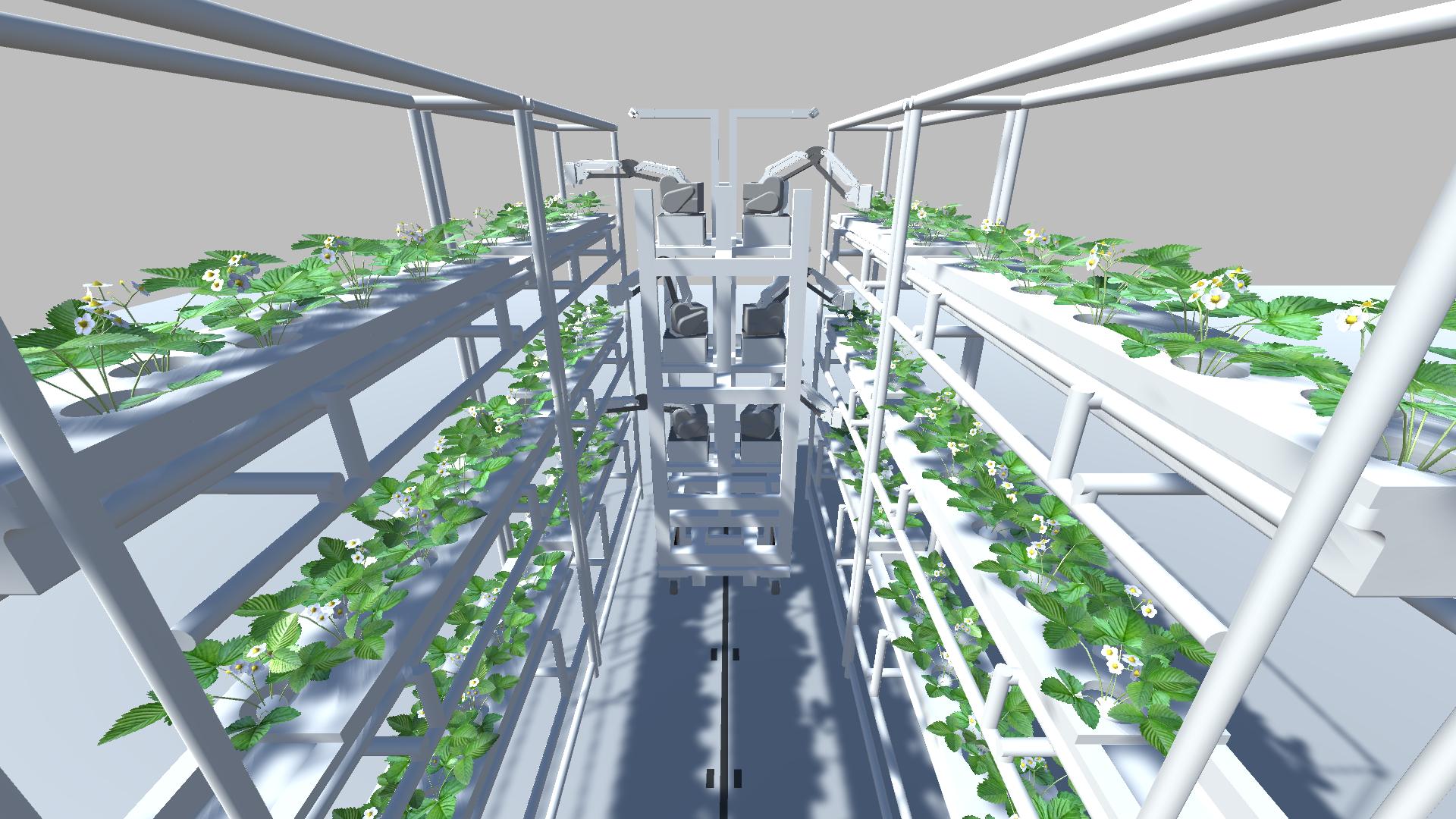
また、植物工場であがる課題を安全に効率よくチームで解決していくために、自社の現場を再現したシミュレータを開発し、開発に活用しています。

HarvestXではロボットシステムの構築に利用しているパッケージの一部を公開しています。
新たな食料生産基盤を確立する過程で生み出される自動化のためのソフトウェアを、ロボット工学分野の発展とコミュニティの貢献につなげることを目的としています。

めしべにまんべんなく花粉を付着させるため、授粉を行うブラシの接触方向を花の向いてる方向に合わせる必要があります。
従来の検出技術では、カメラの映像から花の位置までしか特定できず、その花が一体どの方向を向いているのか、どちら側から筆を当てれば良いのかわかりません。
このため、3Dモデルとそのレンダリング画像を用いて、花の向きの教師データを生成する機械学習技術の開発に取り組みました。
こうして得られるデータに対して、人の顔がどちらを向いているかを検出するニューラルネットワークを応用して適用させることで花の向いてる方向を推定する技術を確立しています。
この技術によってハチには実現できないような綺麗なイチゴの安定的な生産を植物工場にもたらします。