SCROLL
HarvestXの高いロボット技術による高精度な授粉と、センシング技術による環境制御により、どのような地域・環境にも導入可能な人工光型イチゴ植物工場向けパッケージをご提供します。
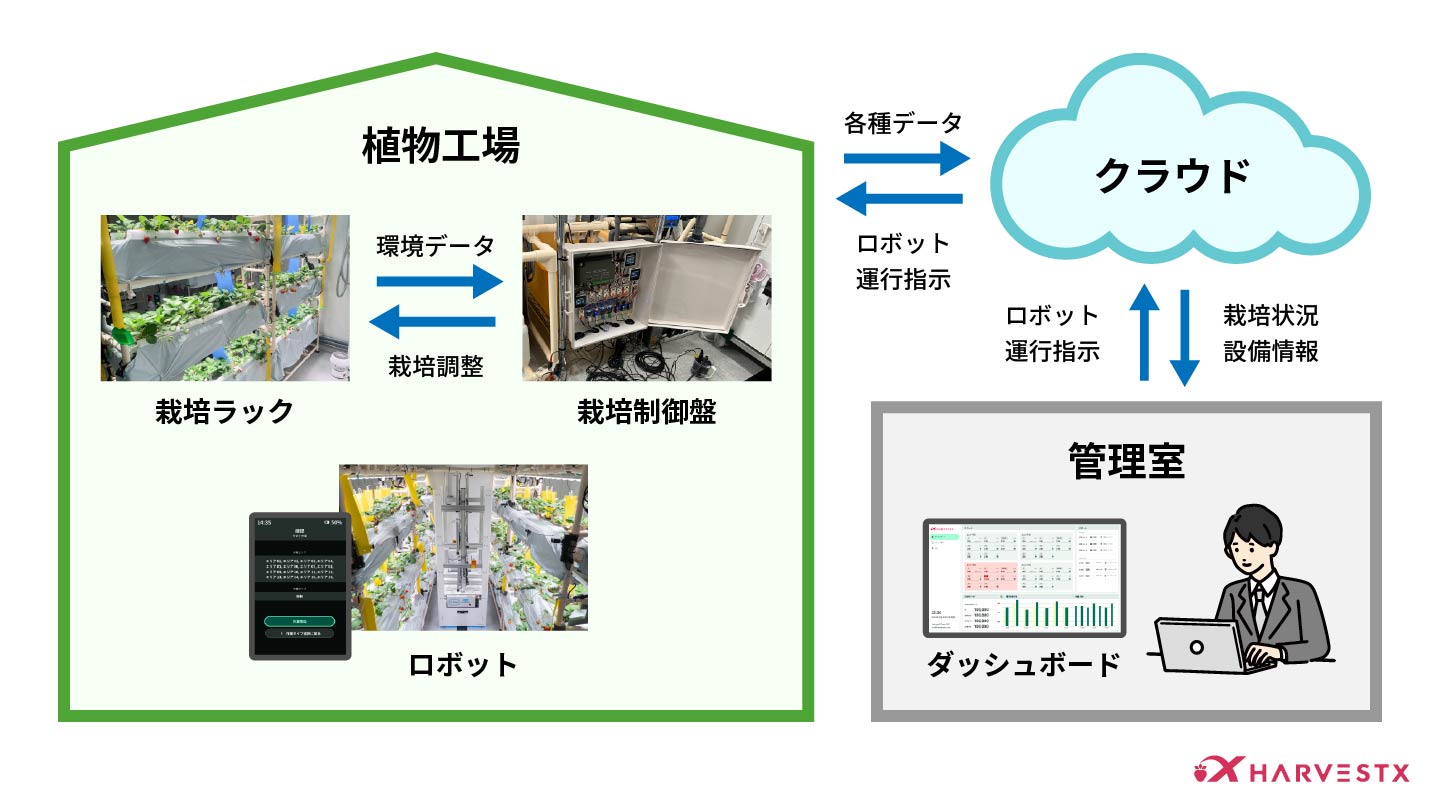
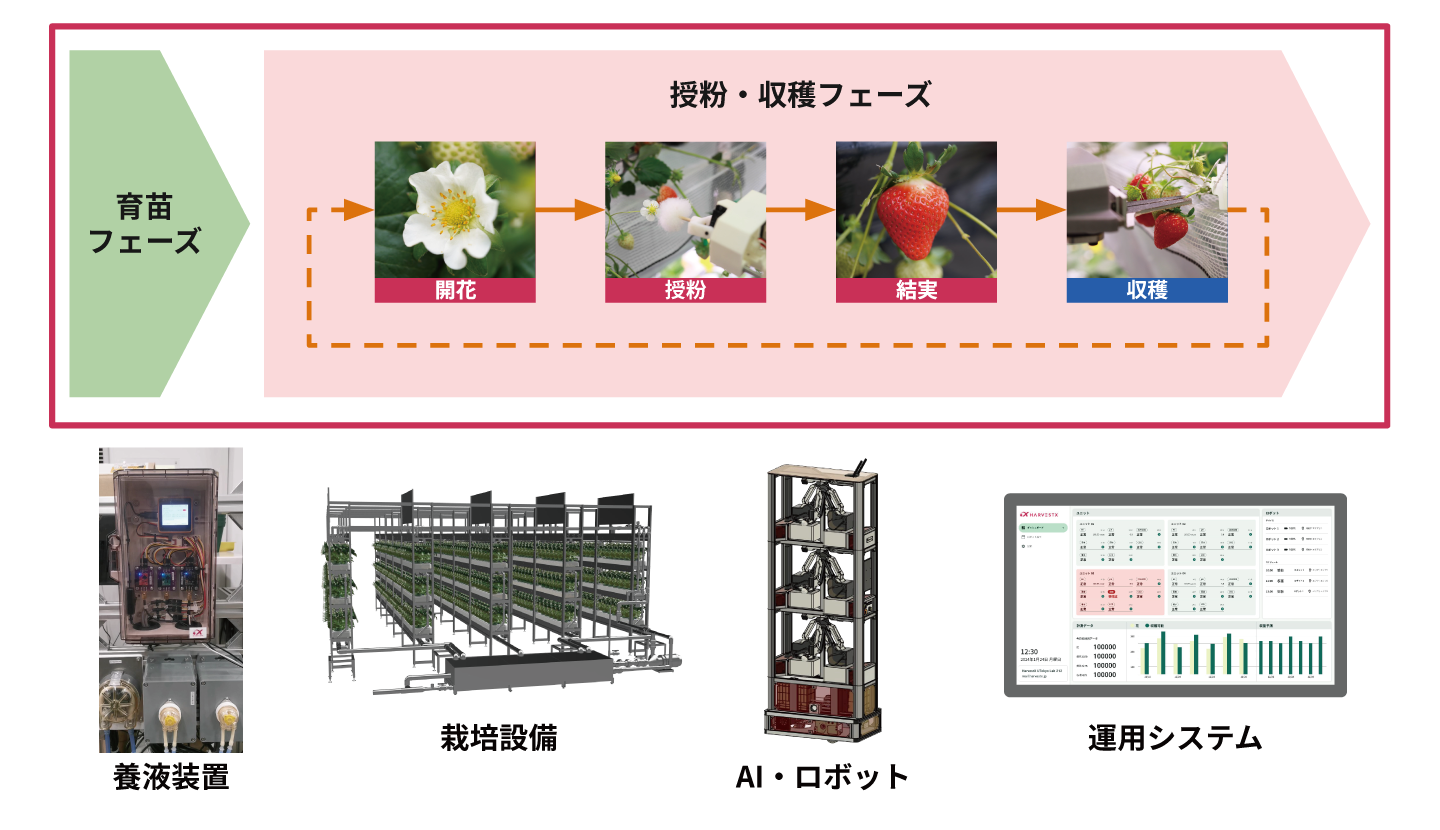
栽培設備・ロボット・AI・運用システム等のご提供により、植物工場でのイチゴ育苗から収穫までを一気通貫でサポートします。

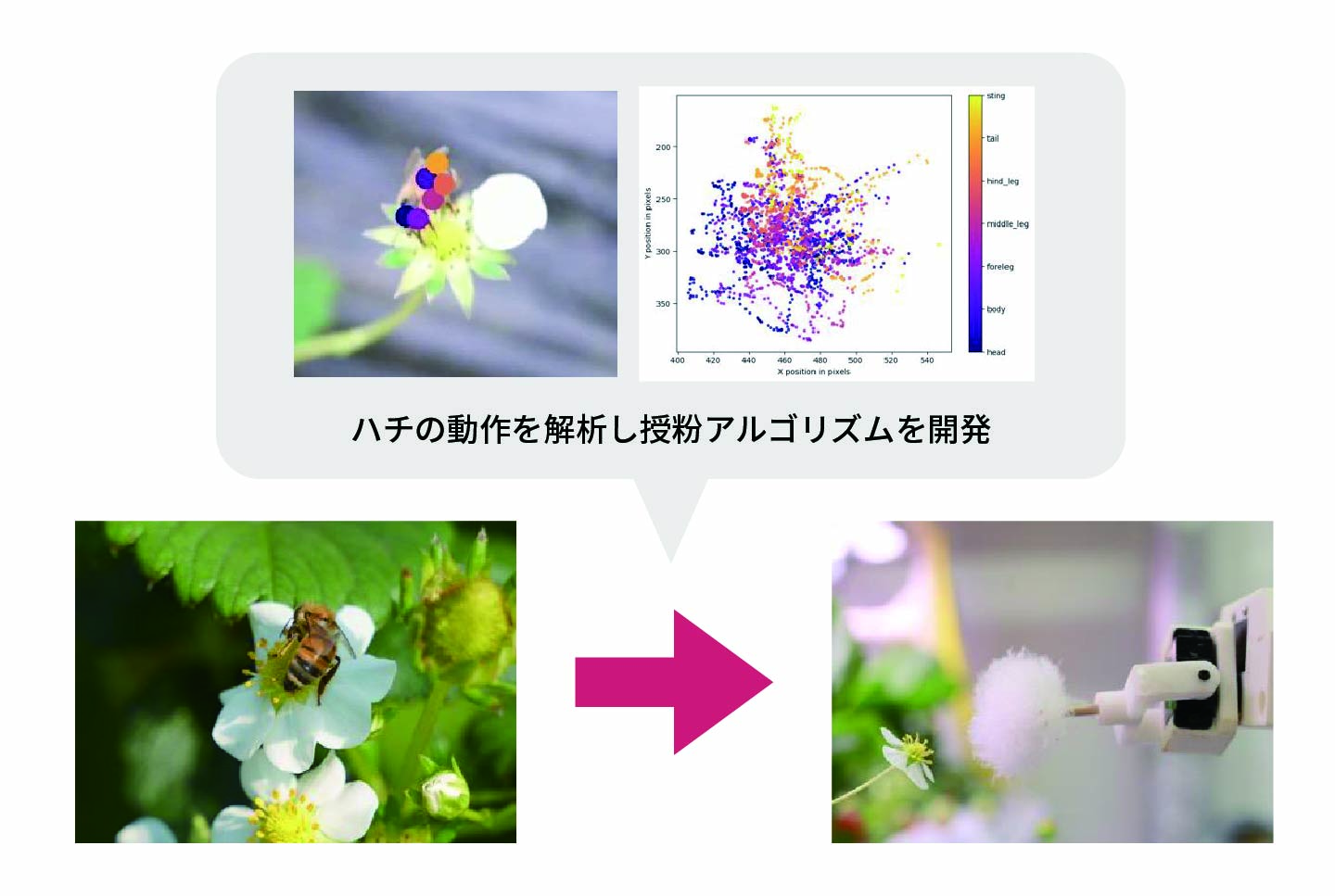
花の授粉に重要な役割を担うハチの動作を解析し、アルゴリズムに組み込みました。
AIとロボティクスの利用に関する中心技術(特許第7090953号)および、素材選定、回転周波数調整、三次元認識等の秘匿ノウハウの組み合わせで模倣困難な優位性を確保しています。
低コストで高精度な授粉と、ハチを用いない衛生的な環境の確保により、食品製造の現場に最適なイチゴの植物工場を実現します。
現時点で栽培と自動授粉を一気通貫で提供可能な企業は当社のみです。

さらなる付加価値のご提供に向け、実証実験を重ねながら技術開発を進めております。
