SCROLL
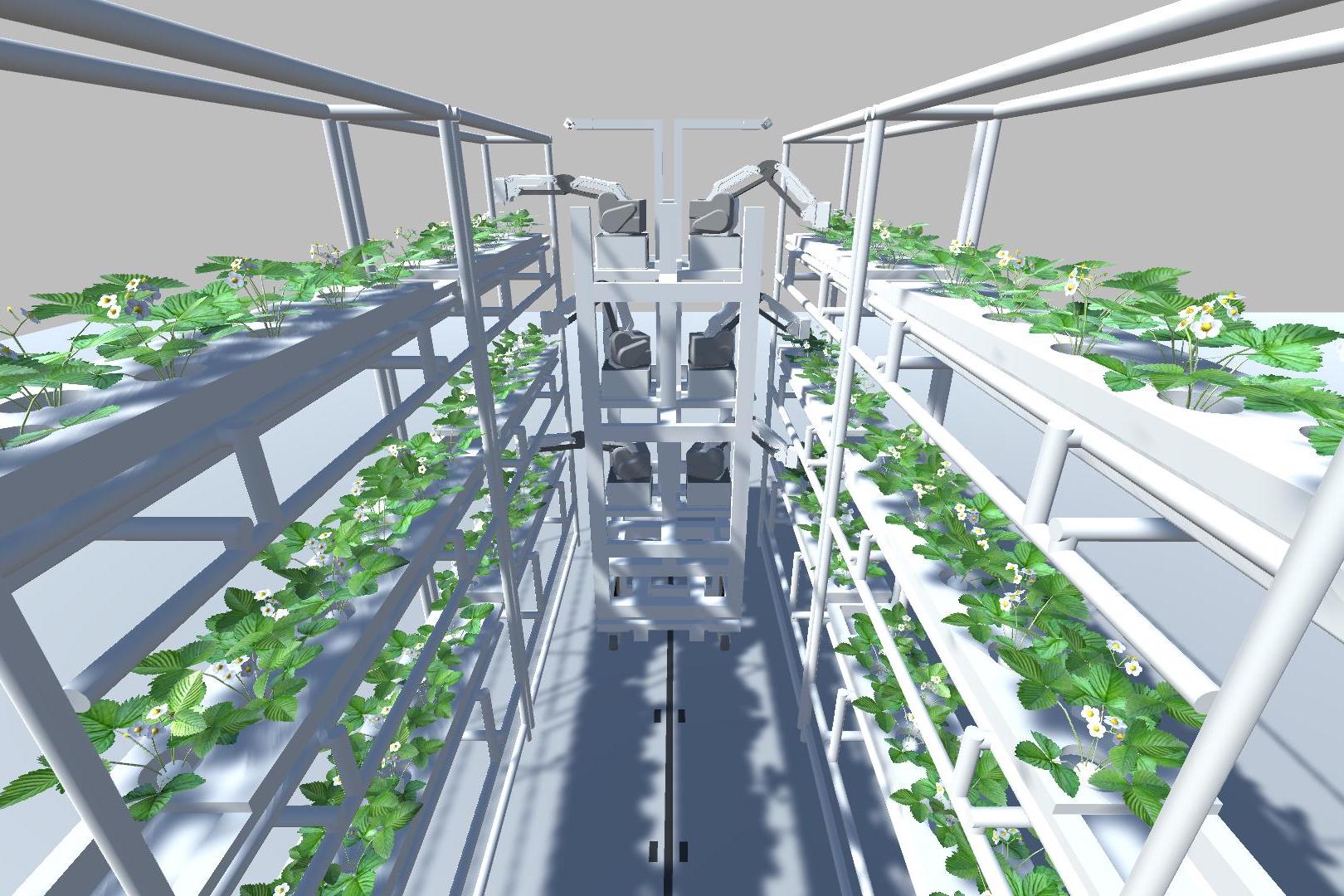
"HarvestX" is a solution providing automation of "plant management", "pollination" and "harvesting" in the strawberry production process in indoor vertical farms using artificial light to ensure stable, hygienic production and increase yields.
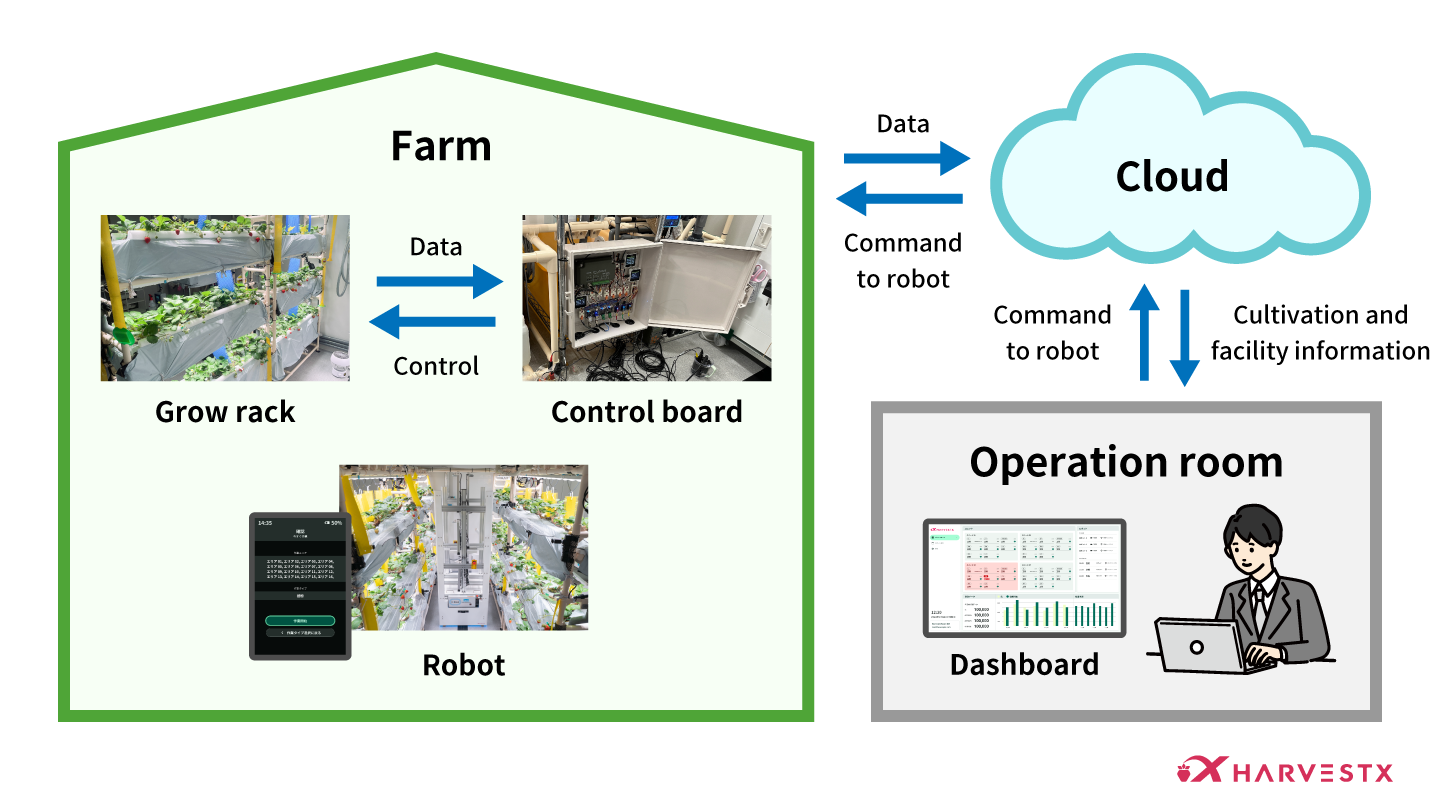

Today pollination with bees or human hands is necessary to produce fruit, but these methods have many problems. Fully automated pollination by robots realizes hygienic and stable strawberry production.

We have advantages in detection algorithms for robotic pollination and harvesting. We develop flower orientation detection for accurate pollination and fruit maturity classification for yield prediction.
Using opportunities to experiment with actual crops effectively is a significant challenge in developing agricultural robots. We develop our robots in an advanced environment using ROS2 and simulation effectively.
HarvestX releases some of our in-house developed code as open source.


There are many rich food cultures in the world. Could we inherit this richness of human culture for future generations? Existing food production systems are threatened by problems such as climate change. We are researching and developing sustainable agriculture through computational science and robot technology to pass on our rich food culture to the next generation.