SCROLL
「HarvestX」は人工光型植物工場でのイチゴの生産過程において、「植物の管理」「授粉」「収穫」の自動化を行い、衛生的で安定した生産と収量増加を実現するソリューションです。
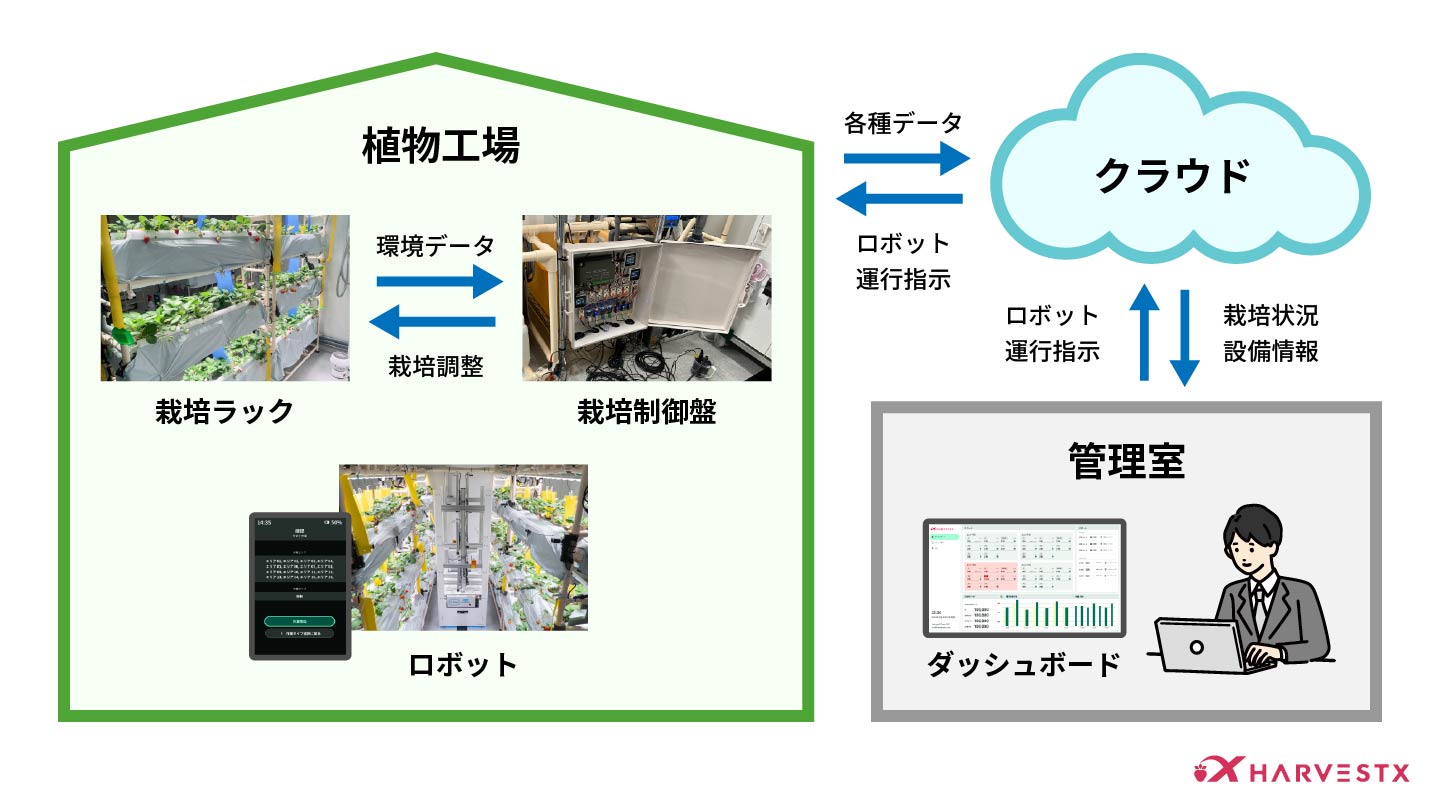

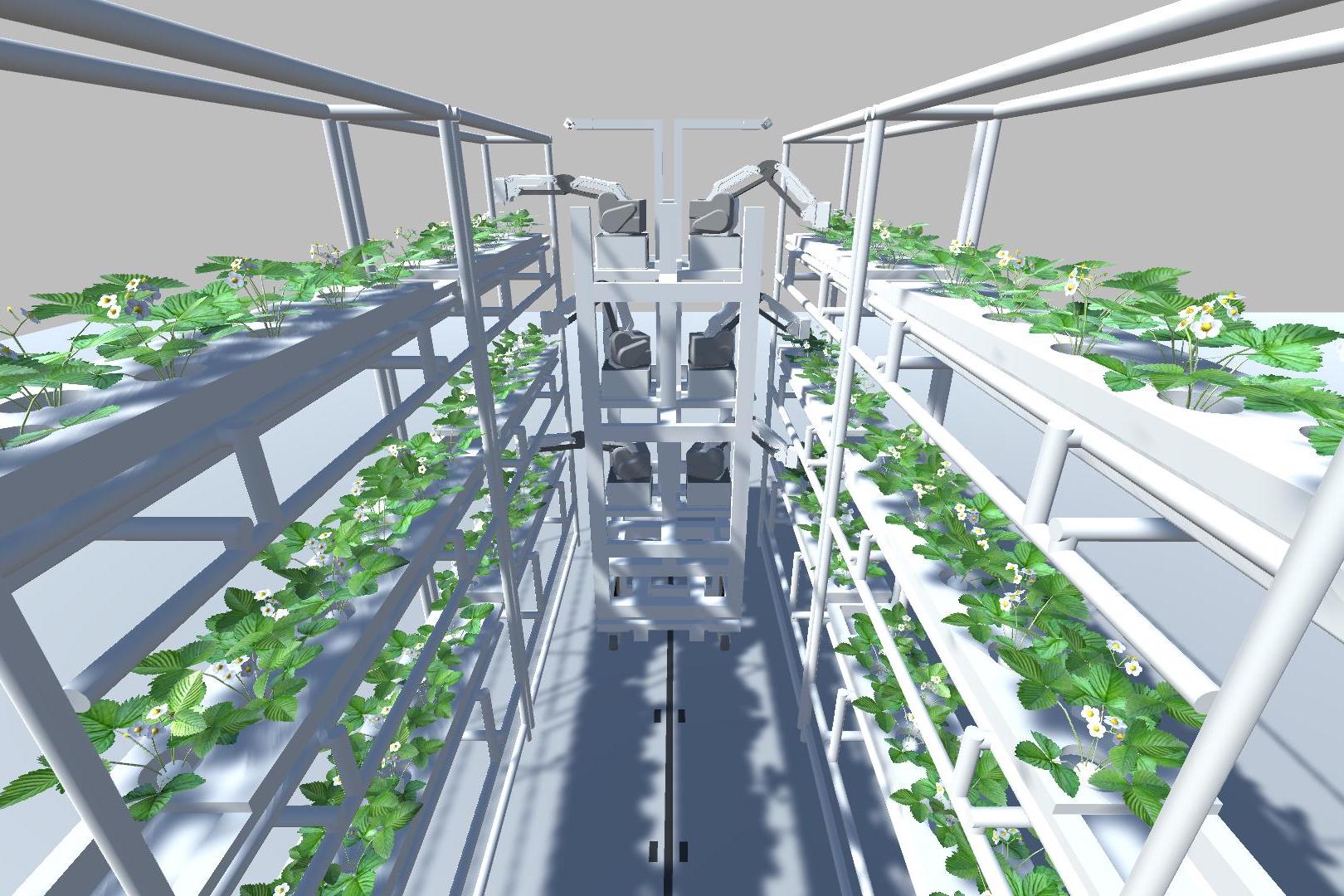
果実が実るためにはミツバチや人力などを用いた授粉が必要ですが、それらにはさまざまな課題があります。ロボットによる全自動授粉を行うことで衛生的で安定的ないちごの生産を実現します。

ロボットで授粉や収穫を行うための果実の検出アルゴリズムに強みを持っています。正確に授粉を行うための花の向きの検出技術や、収量予測のための果実の成熟度分類技術を開発しています。
実際の農作物を用いた実験機会を有効に活用することは農業用ロボット開発の大きなハードルです。ROS2やシミュレーションを用いた先進の環境のもとで効率的な開発を行っています。
HarvestXでは社内で開発したROS2などのコードの一部をオープンソースで公開しています。


世界にはたくさんの豊かな食文化があります。この人類の豊かな文化を未来の世代にも受け継ぐことはできるでしょうか?気候変動などの問題によって既存の食料生産方式は危ういものとなっています。私たちはコンピュータ科学とロボット技術を通じて持続可能な農業を実現し、次の世代に人類の豊かな食文化を受け継ぐことを目標に日々研究開発を行っています。